RPLIDAR a2を買った。


アマゾンで買ったけど、今はちょっと値上がりしているみたい。 ROSを使って動かすのが正統派な使い方のようだが、もっと単純に不良品でないかくらい知りたいので、とりあえずセンサを回してそれっぽい値が取得できるか確かめた。
とりあえずサンプルコードを動かしてみる (macで)
ここからDriverを持ってくる。 https://www.silabs.com/products/development-tools/software/usb-to-uart-bridge-vcp-drivers v5はうまく動かなかったので、V4を使ったらうまくいった。
V5をインストールした後であれば、インストーラーを2回実行するとV5が消えてV4がインストールされるらしい。 https://www.silabs.com/community/interface/knowledge-base.entry.html/2017/01/10/legacy_os_softwarea-bgvU
RPLIDAR SDKを落としてくる http://www.slamtec.com/en/Support#rplidar-a2
ビルドする
$ cd sdk
$ make
macの場合、sdk/output/Darwin/Release 以下にバイナリが生成されている。
UIに表示するプログラムはWindows向けのものしか無いらしい。 部屋の輪郭がなんとなく取れてるかくらい見たかったけど、それはROS使ってやったほうがよさそう。
ROSを使って動かしてみる
- 環境
- Ubuntu 16.04
- ROS Kinetic Kame
rplidar_ros packageを使う。 デバイスドライバのインストールは不要だった。 rplidar_ros_wikiに書いてある通りにやれば良い。
まずビルド済みのpackageがあるので、installする。
$ sudo apt install ros-kinetic-rplidar-ros
USBポートにRPLIADRを指したら、ポートを確認して、権限を設定する。
$ ls -l /dev | grep ttyUSB
$ sudo chmod 666 /dev/ttyUSB0
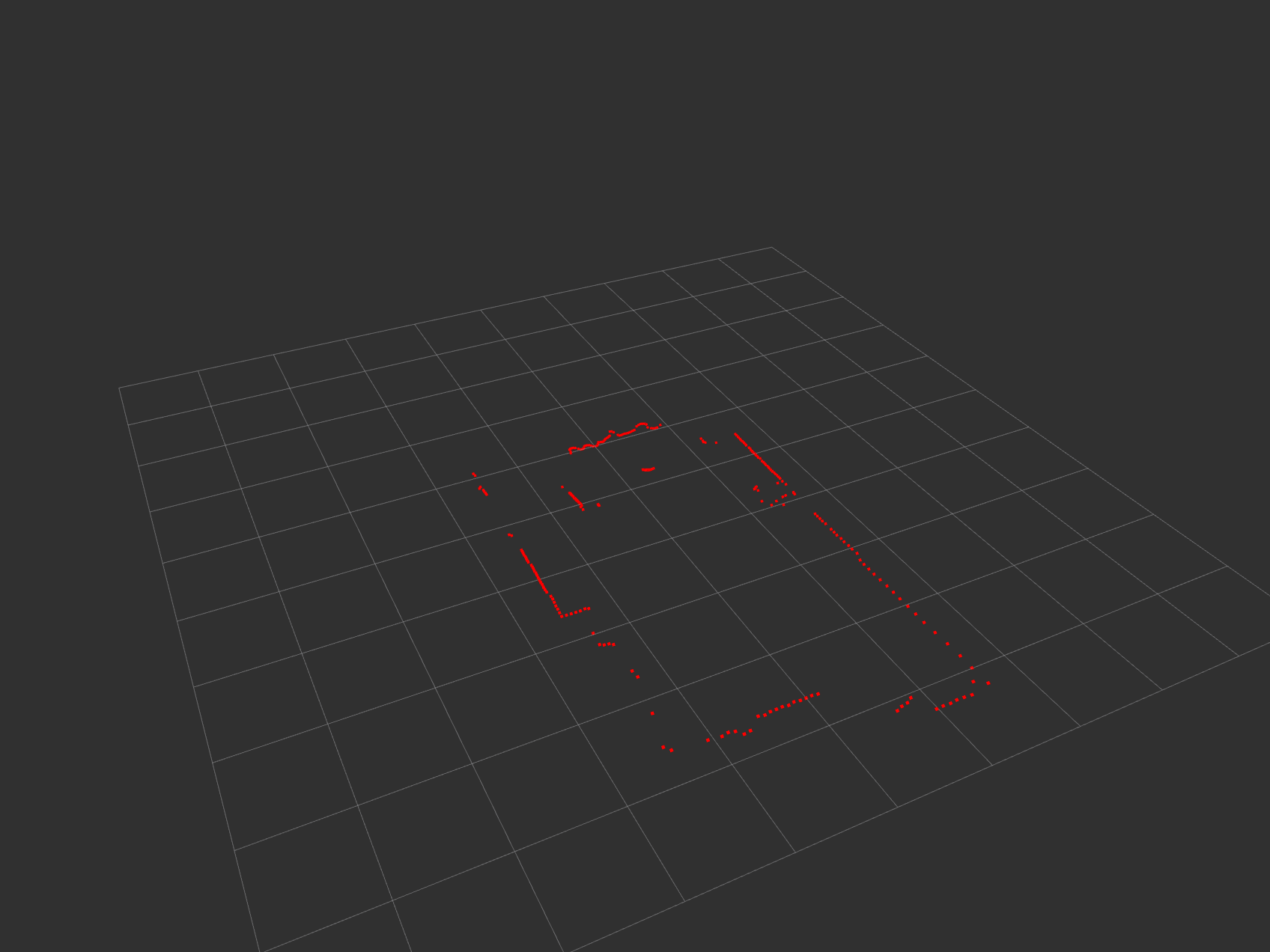
launchすると、Rvizが起動する。
$ roslaunch rplidar_ros view_rplidar.launch
こんな感じで部屋を計測できた。