
{kind=link}
{kind=link}
 現状報告です。百聞は一見にしかず、画像を載せてみます。
現状報告です。百聞は一見にしかず、画像を載せてみます。
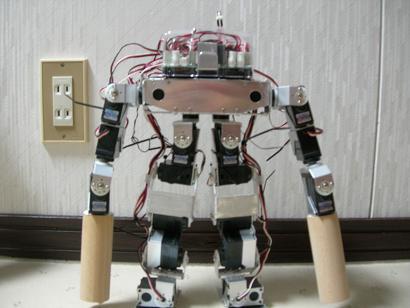
これはKONDO製、対有機生命体コンタクト用ヒューマノイドインターフェイス・・・・・・じゃなくて、ええと。二足歩行ロボットを改造したものです。
販売時には17自由度でしたが、サーボを4つたして、一個壊れて、今は20自由度になっています 。コントロールボードはRCB-1というもので24軸まで動かせます。
{kind=link}
 フレームは必要な部分だけは自作してあります。純正フレームは精 度がとても良いので、できるだけ利用したかったからです。フレームに使ったアルミはホームセンターで売っているもので、軟らかいです。厚さは1.5mmです。
フレームは必要な部分だけは自作してあります。純正フレームは精 度がとても良いので、できるだけ利用したかったからです。フレームに使ったアルミはホームセンターで売っているもので、軟らかいです。厚さは1.5mmです。
{kind=link}
 今の課題はコントロールボードにあると思います。
今の課題はコントロールボードにあると思います。
ただモーションを再生するだけでは面白くありません。ともかく、まず連続して歩けるようにしたいです。そしてなめらかな方向転換・・・・・・。
技術的に今のままではむずかしいです。本読んで学習しないと。
{kind=link}
{kind=link}
PS.KHR-2HVはいい ですね。あのコントロールボード・・・・・・あの価格。でもいろんなことに挑戦したいから、市 販のボードは我慢です。出来る限り自分の力で・・・・・・・。金もないし。
{kind=link}
{kind=link}